Kinect Depth Camera
Grain Weevil Corp.
In order to gather quantitative and qualitative data for a National Science Foundation study, the Grain Weevil Corp. was in need of a depth-sensing camera. This camera would be downward facing and used to map out grain elevation within grain storage facilities. As a Research Engineer Intern, I developed this camera from a Microsoft Kinect v2 using a modified driver. I had previous experience writing in C/C++ from my time in competitive robots but that was two years previous and this project posed new, complicated problems. I enjoyed embracing the learning curve as I began to write the necessary code to fit the study parameters. These modifications include live color-coded depth output, numerical depth output, and topographic overlays. I then designed a 3D model of a test bin to determine how and where to mount the depth camera.
- Expanded knowledge of C/C++.
- Assisted in National Science Foundation research.
- Created custom color phase algorithm to draw depths.
- Utilized OpenCV to identify and draw topographic overlay.
- Built and packaged Windows application.
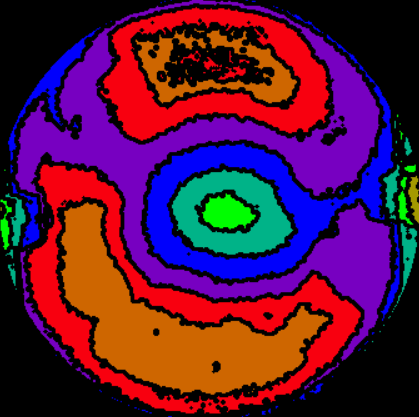
Depth Camera Output with Topagraphy

Topagraphy Map
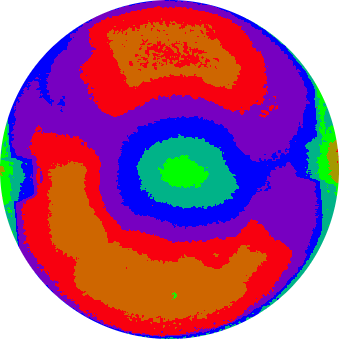
Raw Depth Camera Output
Test Bin Setup